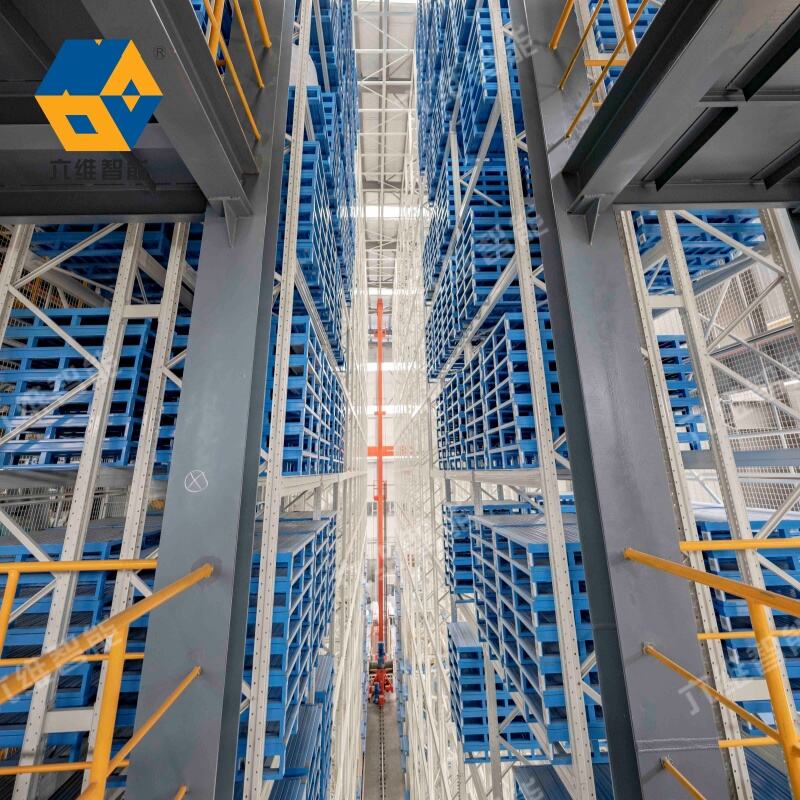
արկեղ և վերցնում համակարգ
Պահեստի և վերցնող համակարգը ներկայացնում է բարդ լուծում, որը նպատակ ունի օպտիմալ պահեստի գործառությունները ավտոմատացնելու և մարմնացնելու միջոցով: Այս առաջադրանքը միացնում է մեխանիկական բաղադրիչներ, թվային կառավարման համակարգեր և ինտելեկտուալ ծրագրեր՝ ստեղծելու համար անընդհատ աշխատանքային հոսք պահեստի համակարգում: Համակարգը օգտագործում է ուղղաձիգ բարձրացման մոդուլներ, ավտոմատացված հիմնավորված միավորներ (AGVs) և ռոբոտական ընտրումների մեխանիզմներ՝ արդյունավետորեն պահեստում և վերցնելու համար պահեստի միջավայրում: Գլխավոր ֆունկցիաներն են՝ ավտոմատացված պահեստի տեղավորում, արագ նյութերի վերցնում, պահեստի հետագա հետևում և տարածքի օպտիմալացում: Համակարգը օգտագործում է առաջացած ալգորիթմներ՝ որոշելու օպտիմալ պահեստի տեղերը՝ հաշվի առնելով արտադրանքի չափսերը, կշիռը, հաճախությունը և ազատ տարածքը: Իրականաժամանակյան հետագա հետևումը թույլ է տալիս ճշգրիտ հետագա հետևում պահեստի շարժումներին, իսկ ինտեգրացված սենսորները և անվտանգության համակարգերը համոզված գործառություններ են ապահովում: Տեխնոլոգիան կարող է կիրառվել տարբեր գործնախատություններում՝ ներառյալ արտադրությունը, վաճառքի տարածումը, դրագույն պահեստները և ավտոմոբայլի մասերի համակարգավորումը: Համակարգի մոդուլային դիզայնը թույլ է տալիս կայունացնելու համար սպասարկվող արդյունավետություններին և կարող է մասշտաբավորվել՝ բավարարելու աճող գործնախատության պահանջներին: Ինտեգրացիայի հնարավորությունները գոյության պահեստի համակարգավորման (WMS) և գործնականության պատրաստումների հաշվարկման (ERP) ծրագրերի հետ ավելացնում են ընդհանուր գործառության արդյունավետությունը: